机器人第一次独立手术!最快55分钟缝合肠道,华裔教授带队研发,“结果显著优于外科医生”
CNN跟踪软组织运动
杨净 发自 凹非寺
量子位 | 公众号 QbitAI
没有人类指导,机器人自己就完成了手术?!
结果还显著优于外科医生。
最近,有这样一项实验引发了大家关注。
美国约翰·霍普金斯研究团队设计研发的手术机器人STAR,在猪的软组织上首次独立完成腹腔镜肠道吻合手术——重新连接肠道的两端。
研究人员表示, 这是朝着对人类进行全自动手术迈出的重要一步。
来看看这究竟是甚么回事?
CNN跟踪软组织运动
一直以来,软组织手术对机器人来说尤其困难。
且不说要求机器人高精度操作,还有各种不可预料的意外情况需要应对决策。
而在腹腔镜手术中,这种难度进一步增加。因为可操作的空间有限,且目标组织会有呼吸运动的伪影干扰。
即便是最轻微的震动或错位缝合,都可能给患者带来严重的并发症。

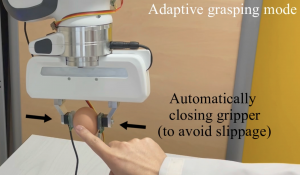
机器人STAR,从诞生之日起,就是专门用于缝合软组织的视觉引导系统。团队为其配备了专门的缝合工具和成像系统,以保证手术区域可视化。
从结构上看,STAR由两个医用机械臂、电动缝合工具,以及NIR(近红外成像)摄像机和一个3D单色内窥镜组成。
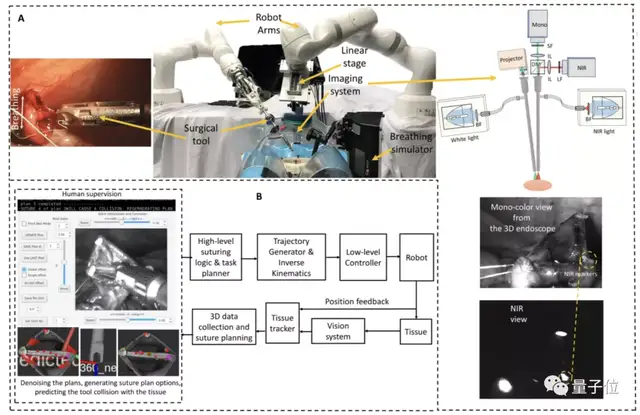
这个机器人最大的特点,就是以最少的人工干预来规划、调整和执行软组织手术。
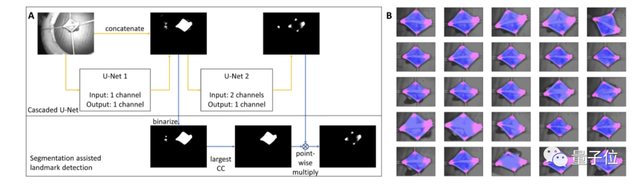
为实现这一点,研究人员开发了基于结构光的3D内窥镜和基于机器学习的跟踪算法来指导STAR,用来规划缝合。
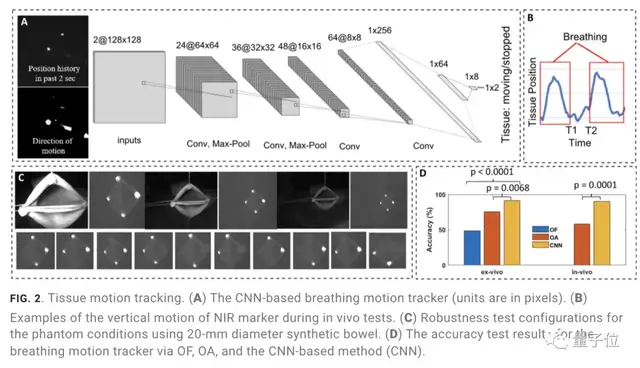
目标跟踪算法使用了卷积神经网络CNN,基于U-Net架构,输入包括近红外摄像头标记的过去 2 秒内的位置历史以及从现在到2秒前的运动方向。
整个网络涵盖4个卷积层、3个密集层和2个输出。
卷积层和前三个密集层的激活函数是 Rectified Linear Unit (ReLU),最后一个密集层的激活函数是SoftMax。
该网络在训练阶段预测运动曲线,准确度达93.56%。
除此之外还有许多自主功能,包括启动/暂停/解除组织跟踪系,检测软组织的呼吸运动及其变形,控制摄像机运动,缝合规划、预测工具与软组织碰撞等。
如果 STAR 检测到与当前手术计划相比组织位置的变化大于3mm,则通知操作员启动新的缝合计划和批准步骤。
接着,操作员就只需看着机器人操作了。
在这项缝合任务中,超过83%的工作流程都是机器人自主完成的。有时候仍需要操作员手动微调机器人,以便出现漏缝时纠正定位。
(相机放置在距离目标组织 5 到 8 厘米处)
以往的工作中,组织追踪仅考虑静止组织,没有考虑到呼吸运动,包括噪声预滤波和碰撞预防,也无法自主形成重新规划建议。
操作员需要监测缝合过程的每个子步骤,因此只有57.8%的缝合工作是机器人自主完成的。
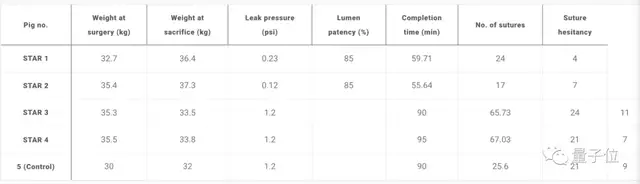
最终结果显示,STAR在四只动物身上进行了同样的手术,整个手术时间大概在4小时,结果均显著好于人类。
尤其在位置校正、缝合间距、缝合线咬合大小、完成时间、管腔通畅和泄漏压力等维度,均好于目前已开发的自主系统、专家手术等。
在完成时间上可以看到,最短在1小时之内就已经完成。
主要作者之一,约翰霍普金斯大学教授 Axel Krieger表示,STAR产生的结果明显优于人类,这意味着机器人可自主完成肠道两端的重新连接。这是手术中最复杂、最精细的任务之一。
值得一提的是,本次研究团队中看到了一位华裔教授的身影。
Jin U. Kang,电气和计算机工程教授,光学成像方面的专家,是约翰霍普金斯大学卡夫里神经科学发现研究所和计算传感与机器人实验室的成员。
2008年至2014年担任电气和计算机工程系的主席。
感兴趣的旁友,可戳下方链接了解详情。
论文链接:
[1]https://www.science.org/doi/10.1126/scirobotics.abj2908
参考链接:
[1]https://me.jhu.edu/news/robot-performs-first-laparoscopic-surgery-without-human-help/
[2]https://hub.jhu.edu/2022/01/26/star-robot-performs-intestinal-surgery/
- 谷歌版Sora升级4K高清!一句话控制镜头运动,跑分叫板可灵海螺2024-12-17
- 「AI定义汽车」新拐点已至!小米孟二利:我们有三个工作需要做好2024-12-13
- 月薪1万4的ChatGPT要来了!OpenAI自曝其达博士级别,网友:我宁可聘请一个博士2024-12-16
- OpenAI附议Ilya预训练终结!“但Scaling Law还没死”2024-12-16
相关阅读