「土行孙」机器人登上Science子刊封面,用气流在地下穿梭自如
会挖洞的低配版大白
明敏 发自 凹非寺
量子位 报道 | 公众号 QbitAI
你能想到这个看上去略显呆萌的“异物”,其实是个能挖洞的软体机器人吗?

怎么让我想到了大白?
不仅是长相,连构造上都有点像。
这个挖洞机器人和大白一样也是充气的。
而且在能力上也像大白一样强悍,在没有任何挖掘工具的情况下都能灵活遁地。
比如,短短几秒钟就能钻到沙土里。
深入“地下”也是so easy,速度还非常快。
而且可以像土行孙一样潜在地下、穿梭自如。

这就是最近登上Science子刊《Science Robotics》封面的软体机器人,由加州大学圣巴巴拉分校和佐治亚理工学院的研究人员共同开发。
它能以每秒4.8米的速度在干燥沙土中打洞,还可以在沙里360度灵活转向。
这也为研究机器人如何在地下工作打开了一个新思路。
目前,该团队已经与NASA达成合作,为月球、土卫二提供挖掘技术。
气流遁地术
所以,这个看上去“手无缚鸡之力”的软体机器人,是如何在地下工作的呢?
要知道,地下环境中的阻力可比空气、海洋中的大多了。
这也是机器人尚未能在地下空间大展拳脚的主要原因之一。
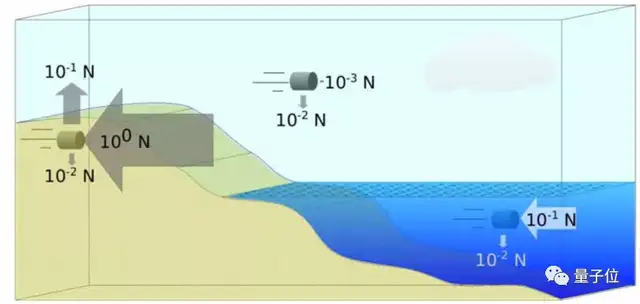
△不同介质中的阻力差别
为此,科学家们开始从地下生物身上找灵感。
首先被想到的就是植物的根茎。
它们能够在地下纵深蜿蜒,主要靠的就是根茎尖端。
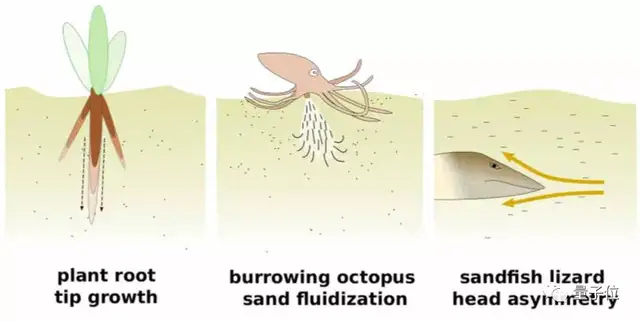
所以这款软体机器人也有一个类似的机械尖端,可以用来开路;主体部分选用了较为光滑的软管,用气体来驱动机器人前进。
这样可以提升机器人行动的速度和灵活性。
不过研究人员很快发现,当机器人在沙土中越走越远时,它的身体也越来越长,产生的阻力就会随之增加,最终它会因为克服不了阻力而动弹不得。
这时,他们又想到了章鱼。
章鱼是软体动物,它想要潜入沙堆里时,会先喷出一股水流把沙子打散,然后用触手把自己拉到沙子里。
所以,研究人员在机器人的尖端上又加了一个空气喷流装置。
让它先把沙子打松散,以降低机器人通过时的阻力。
当机器人前进的阻力问题解决后,研究人员发现它的前进效果还是不够好。
因为机器人总是在沙土里走着走着,就探出了头。
这其实是因为在沙堆中的受力情况非常复杂,除了水平方向上的阻力,还有垂直方向产生的升力。
因此,机器人很难始终保持在一种平衡的状态下。
那么如何让它在地下穿梭自如呢?
这一次,研究人员想到了沙漠中的爬行动物。
比如砂鱼蜥,就可以利用楔形的头部来调整在土里的升力。
为此,研究人员加装了一个垂直方向上的空气喷流,以对抗机器人在潜行过程中会产生的升力。
从效果看,虽然机器人这样走的非常狂野,但是它能够保持在地下潜行了。
阻力大幅减小
为了能准确了解软体机器人的运行情况,研究人员分别测试了软体机器人3种情况下的表现:
- 只有尖端装置
- 加装有1个气流装置
- 加装有2个气流装置
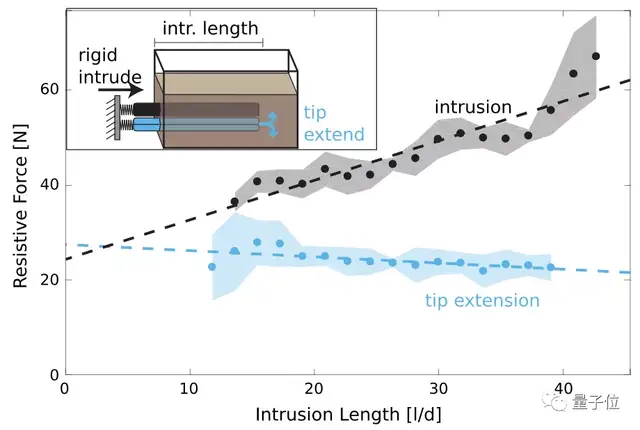
在仅使用机械尖端开路的情况下,软体机器人在水平方向上前进的阻力,并不会随着路线的增加而增长。
而不使用尖端开路的情况下,阻力和路线长度成正比。
在软体机器人安装1个气流装置后:
垂直方向上,不使用空气气流驱动时,所产生的阻力和到达的深度成正比。
而随着气流速度的不断增加,所产生的阻力会明显减小,但是到达一定的深度后阻力还是会大幅上升。

研究人员测试了在不同深度的沙土中,软体机器人水平运动时的阻力和升力情况。
同时,他们也改变了气流装置的角度,其中0度表示与水平方向平行,90度则表示与水平方向垂直。
数据显示,在43mm和80mm的深度中,软体机器人前行时的阻力都随着气流速度的增大而降低(下图B和C)。
不过阻力大小和气流角度就不是简单的正负比关系了。

在升力方面,增加气体流速会降低升力。
在40mm深度中(图D),气流夹角在0-30度之间,升力会随着角度的增大而增大,在30度时达到最大值;
在30-60度之间,升力随着角度的增大,大幅降低;
60-90度之间,升力基本保持不变。
在80mm深度中(图E),也显示了类似的趋势,较低角度对减少升力的效果较差,随着角度升高,能达到的效果会相对更好。
在1个动力气流装置的基础上,加装1个垂直方向的气流装置后:
软体机器人的潜行效果和垂直方向上的气流流速呈正比。

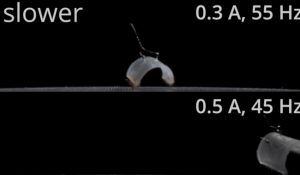
在低速下,软体机器人潜行9.2s后就从沙土里钻了出来;
在高速下,运行24.6s后仍旧能很好埋在沙里。
未来将走向太空
像这样的小型软体挖掘机器人,能够应用的场景有很多,比如土壤采样、地下勘探等。
而且这种机器人还能把自己固定在介质中,这对太空低重力环境中的探索非常有意义。
目前,该研究团队已经与NASA开展了一个合作项目,为月球、土卫二开发提供挖掘技术。
通讯作者Elliot Hawkes表示:
我们相信这种挖洞方式有可能为机器人在太空应用开辟新的途径。
Elliot Hawkes是加州大学圣巴巴拉分校机械工程学的一位助理教授,主要研究方向为动力系统和机器人控制。
参考链接:
[1]https://robotics.sciencemag.org/content/6/55/eabe2922
[2]https://www.youtube.com/watch?v=v1nmNDtqs4Q
[3]https://www.sciencedaily.com/releases/2021/06/210616154236.htm
- 智平方郭彦东:具身智能产业化成败在”物理世界大模型”工程化能力2024-12-26
- 业界首次!一个端到端原生机器人大模型搞定100+灵巧手复杂操作2024-12-26
- Ilya宣判后GPT-5被曝屡训屡败,一次训数月,数据要人工从头构建2024-12-22
- Sora开服被挤爆!支持中文/编剧模式/作品分享,145块就能玩2024-12-10
相关阅读