盘点CVPR’24自动驾驶挑战赛:中国团队勇夺5冠5奖,重庆跑出AI黑马
“未来靠可解释的端到端”
一凡 发自 副驾寺
智能车参考 | 公众号 AI4Auto
7个赛道,5个冠军。
这就是中国团队,最近在国际大赛上取得的成绩,不是乒乓球赛哦。
而是AI顶会CVPR 2024举办的自动驾驶国际挑战赛,汇聚了包括中国、美国和德国在内等10多个国家,上百支队伍参赛,其中包括英伟达、AMD、博世等领域巨头,以及多所知名高校。
然而最终获奖名单,多少让人意外,有几家初创企业杀出重围,脱颖而出。
更让人惊讶的是,获奖名单中,竟然还有一家传统车企。
但细扒获奖团队会发现,这也在情理之中。
CVPR’24自动驾驶国际挑战赛成绩盘点
CVPR 2024自动驾驶国际挑战赛(Self Grand Chanllenge)获奖名单出炉。
纵观名单,有三点值得关注。
首先是,中国团队大丰收。
本届挑战赛共设置7个赛道,中国团队在5个赛道夺得冠军,赢得了5项创新奖:
特别是占用网络和运动预测组(Occupancy And Flow),前十名被中国团队包揽。
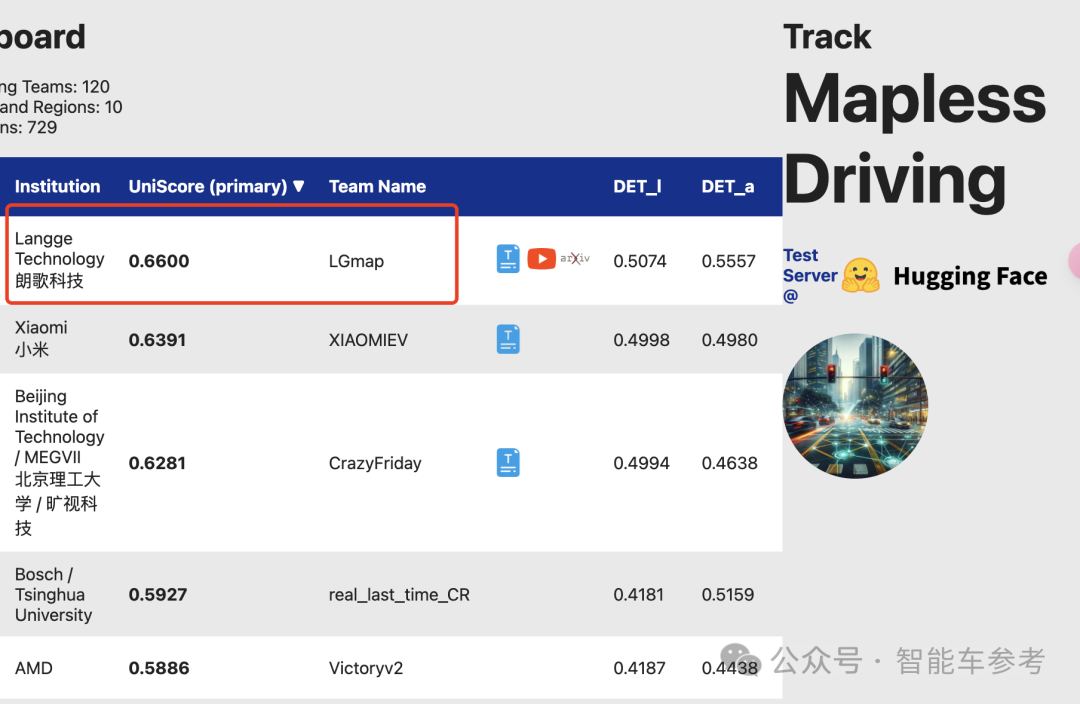
其次,还有一点值得关注的是,脱颖而出的初创企业们:
朗歌科技、零一汽车以及Wayve。
它们从上百支队伍中突出重围,有的创立只有两三年,便在国际大赛上力压巨头。
创立于2021年,吉利控股的朗歌科技,在无图赛道夺得第一名和创新奖,力压第四名博世与第五名AMD。
还有来自苏州,创立于2022年的零一汽车,在炙手可热的端到端赛道获得了第二名,仅次于巨头英伟达。
零一汽车由图森未来联合创始人黄泽铧与三一重工原总经理张红松创办,现已交付新能源重卡惊蛰与小满。
无论是在商用车,还是自动驾驶领域,都是极有前景的明星创企。

还有英国自动驾驶独角兽Wayve,在挑战赛上联合图宾根大学,获得了CARLA自动驾驶挑战赛道传感器组的冠军,以及地图组的亚军,还有该赛道创新奖。
其创立于2017年,不久前因为来自软银、微软和英伟达等巨头,共计10亿美元的融资而受到关注。

最后,还有两个出人意料的团队,值得关注。
一个是算力选手,浪潮信息。
提出了“F-OCC”算法模型,在模型架构、数据处理以及3D体素特征编码模块等方面进行优化,最终实现了占用网络&运动预测赛道的最好成绩。
以上这些团队,多多少少,都和AI有关系,有的是自动驾驶大牛创办,有的主营业务就是智能驾驶。

相比之下,整场赛事中,最出乎意料的获奖者,莫过于传统车企长安汽车了。
长安联合重庆邮电大学发表的工作,获得了自动驾驶应用LLM的创新奖,成为唯一一家获奖的传统车企。
同时还在电动化方面,获得了肯定。
百年长安,科技长安
百年长安,持续焕发科技新春,近日双喜临门:
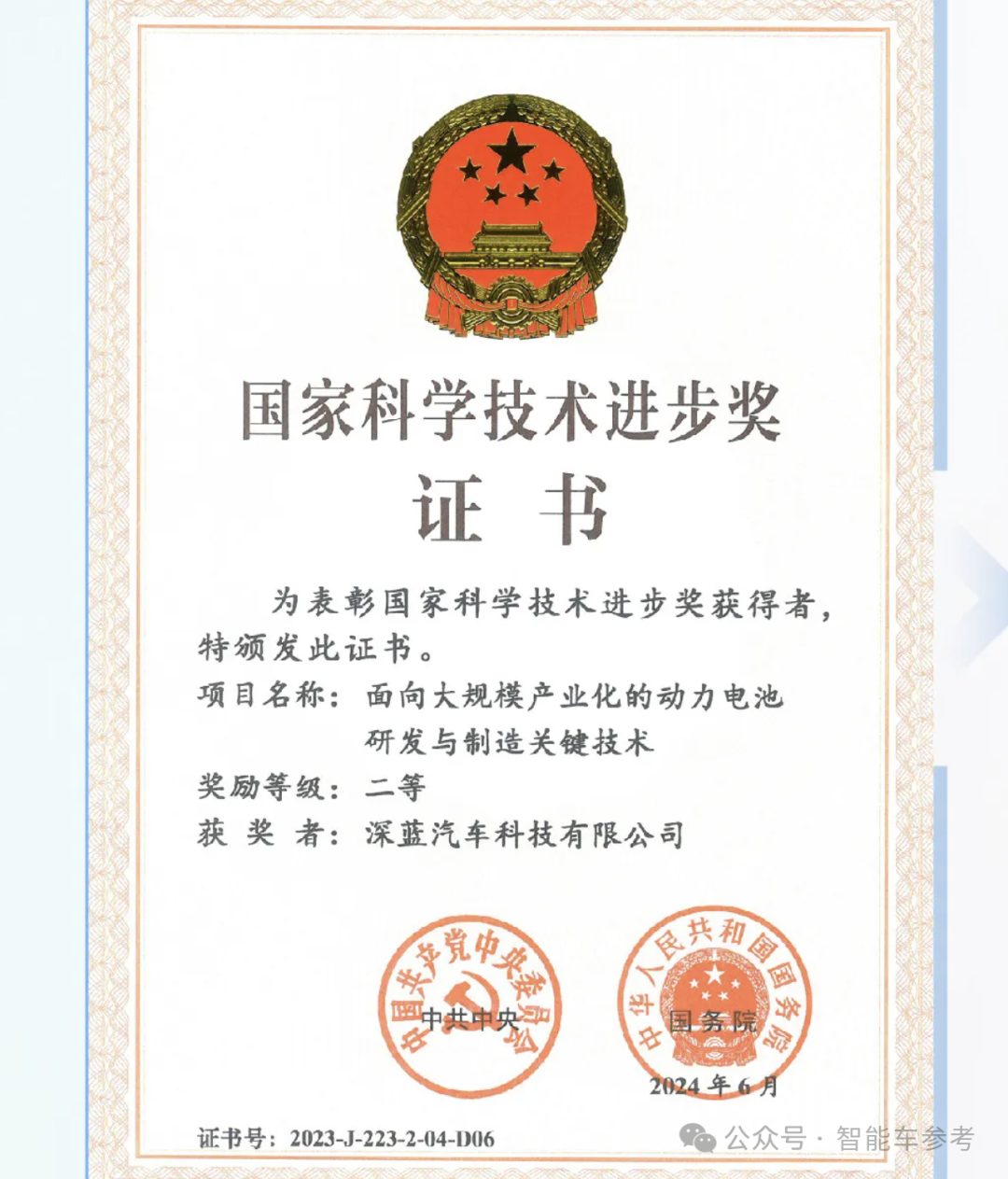
一则好消息,来自电动化方面。
长安旗下深蓝汽车获国家科学技术进步奖二等奖,以表彰其联合宁德时代,在动力电池方面的研究成果。
另一则好消息,就是前面提到的智能化成绩。
长安联合重庆邮电大学,提出了名为BeVLM的新架构,整合了BEV编码器和基于GoT机制的大语言模型,增强了模型对上下文的理解,整个过程是端到端的。
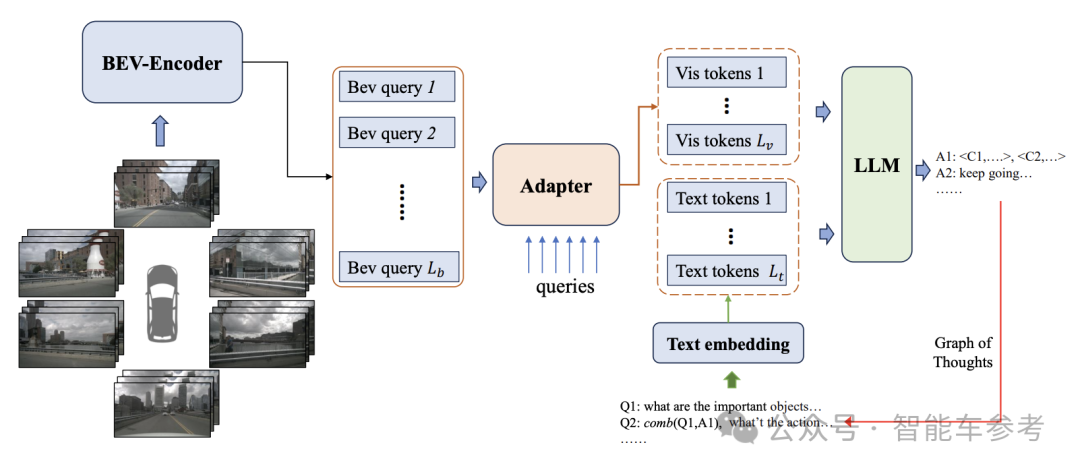
因为其在大模型理解空间关系方面的创新,最终工作获得了细分赛道的创新奖。
细扒获奖团队名单,会发现自动驾驶大牛陶吉的名字,赫然在列。
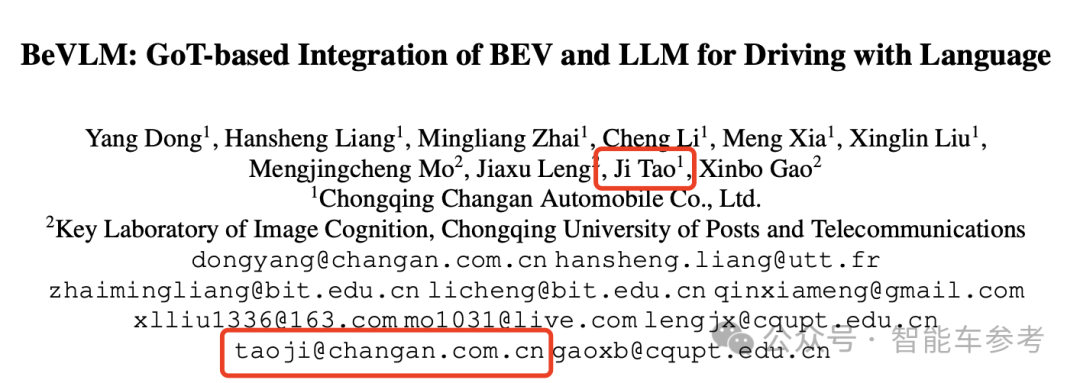
陶吉,曾从0到1深度参与百度自动驾驶项目的全过程,是百度内部最早开启自动驾驶的元老,也是百度自动驾驶从实验室走向事业部的第一人。
他在技术方面感知、规控、决策等等技术模块都积累过丰富经验,此外还主导建立了百度车路协同项目。
于去年8月被曝加盟长安。

大牛加盟,给团队带来的影响,果然是立竿见影。
最后,还是说回CVPR 2024这次的国际自动驾驶挑战赛。尽管这次组委会将赛事分成了7个赛道,看似是按照传统的感知、预测、规划的模块。
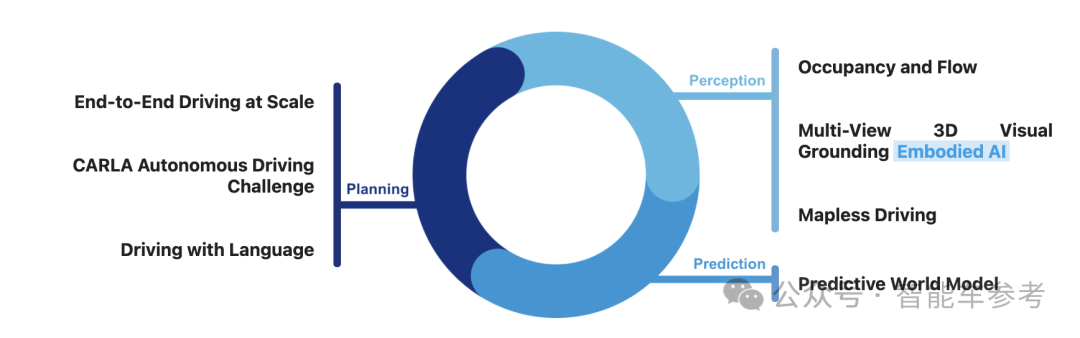
但组委会表示,其划分赛道的目的,旨在打破之间的壁垒,相信未来属于“可解释的端到端”,端到端可以“理解世界”,并且能处理未曾到过的场景。
组委会同时还强调了大模型和世界模型,给行业带来的巨大潜力。
学界仍在相信大模型,相信端到端,将给自动驾驶带来深刻变革。
获奖名单地址:
https://opendrivelab.com/challenge2024/
BeVLM论文地址:https://opendrivelab.github.io/Challenge%202024/language_ADLM.pdf
Github地址:https://github.com/BEVLM/DrivingWithLanguage
- 雷军宣布小米YU7全系标配激光雷达!强调了11次“安全”2025-05-23
- 年内最大IPO:万亿宁王港股敲钟,开盘暴涨17%,瞄准全球零碳2025-05-20
- 蔚来新车敢这样升级,我就要好好说道说道了!2025-05-18
- 卷爆了!智己L6全系标配城区NOA后轮转向800V,难怪狂揽3万单2025-05-16