稚晖君后宇树也来玩开源了:机器人操作数据集,采用抱抱脸LeRobot训练测试,网友:泰裤辣!
采用抱抱脸LeRobot训练测试
西风 发自 凹非寺
量子位 | 公众号 QbitAI
继稚晖君之后,国内又一家头部机器人公司玩起了开源!
宇树科技,开源Unitree G1机器人操作数据集,包括数据采集、学习算法、数据集和模型,并表示将持续更新。
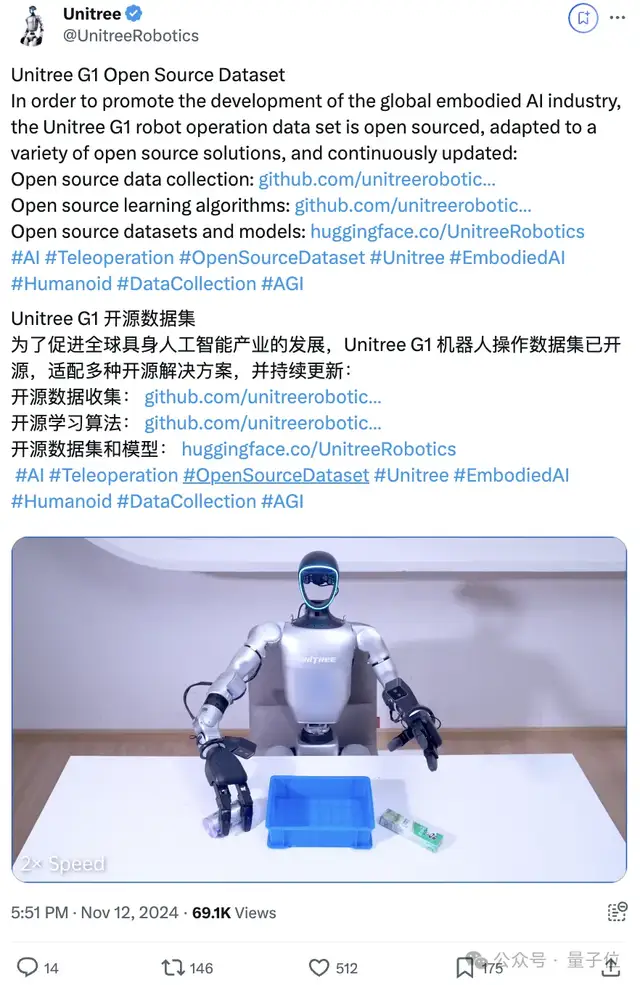
更令网友意外的是,宇树基于抱抱脸LeRobot开源框架训练并测试。

抱抱脸联合创始人兼CEO紧忙码住转发:
泰裤辣,LeRobot、huggingface和开源技术在机器人领域日益突出。

此套开源数据集目前包括拧瓶盖倒水:

叠三色积木等5种操作:
网友对于宇树这波开源纷纷竖起了大拇哥:
好哇好哇,希望更多公司能为机器人研究开源数据集。
具体都开源了啥?
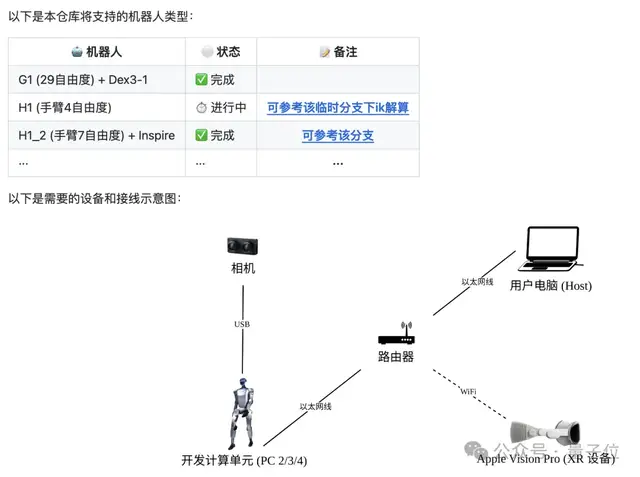
具体来看,数据采集方面,目前使用苹果Vision Pro对G1进行遥操作控制的仓库,已超400star:
其中包含遥操作控制的代码教程:
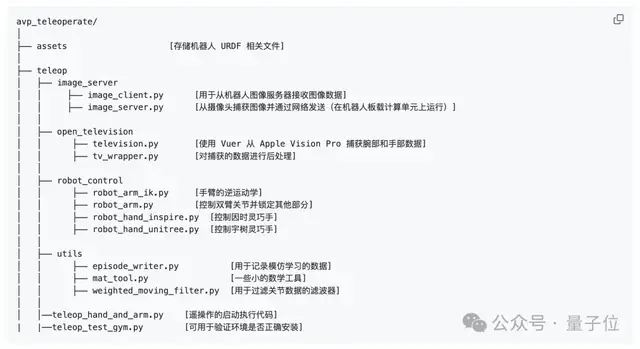
以及硬件配置图、物料清单和安装说明:

训练方法如前所述,基于lerobot:

还有将前面遥操作采集的JSON格式数据转为lerobot所需格式的教程。
最后就是数据集和模型,目前模型还显示“尚未公开”,数据集使用配备有三指灵巧手的宇树G1人形机器人收集,每张图分辨率为640×480,每个手臂和灵巧手的状态和动作维度为7。
包含五大操作数据集:
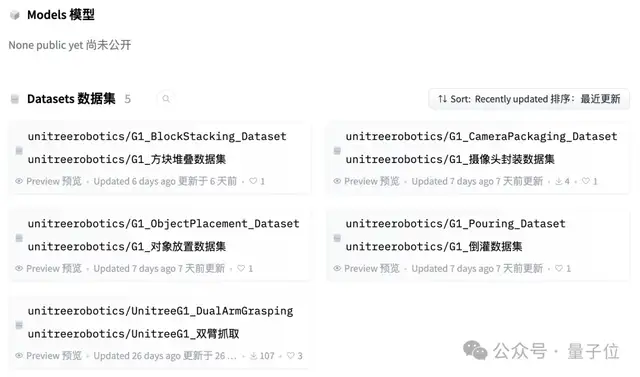
除了开头所展示的拧瓶盖倒水、堆叠红、黄、绿三色木块,还有将摄像头放入相应包装盒、收集物品并存储、双臂抓取红色木块并将其放入一个黑色长方形容器中:

宇树G1 9.9万元起,已量产
最后再来简单介绍一下宇树G1,量子位此前也有持续关注。
今年5月份首次亮相,当时官方首先展示的就是它的手部以及操作能力。
也是采用3指力控灵巧手,通过力位混合控制,能拧瓶盖、砸核桃,还能做焊接。
在视觉传感器方面,搭载了Intel RealSense D435和LIVOX-MID360 3D激光雷达,能够实现360°的探测感知。

8月份,宇树更是宣布G1可大规模量产了。
基于端到端深度强化学习和仿真训练的技术路线,G1可快速升级迭代。
G1量产版性能更强,能单腿跳跃:
还能原地起跳360度转身:
而且发售价9.9万起,让一众同行坐不住。
如今伴随G1数据集开源,距离让机器人替我上班是不是又前进了一丢丢。

参考链接:
[1]https://x.com/unitreerobotics/status/1856273635461488867?s=46
[2]https://github.com/unitreerobotics/avp_teleoperate/blob/g1/README_zh-CN.md
[3]https://huggingface.co/unitreerobotics
[4]https://github.com/unitreerobotics/unitree_IL_lerobot
- 又一开源AI神器!将机器学习论文自动转为可运行代码库2025-05-01
- 一次示范就能终身掌握!让手机AI轻松搞定复杂操作丨浙大&vivo出品2025-05-01
- AI卧底美国贴吧4个月“洗脑”100+用户无人察觉,苏黎世大学秘密实验引争议,马斯克惊呼2025-04-30
- 全网首测!Qwen3 vs Deepseek-R1数据分析哪家强?2025-04-30