无需3D数据也能训练,港科&港中文联手华为推出3D自动驾驶场景生成模型
同时实现2D数据生成3D场景的可控性与几何一致性
允中 发自 凹非寺
量子位 | 公众号 QbitAI
无需采集3D数据,也能训练出高质量的3D自动驾驶场景生成模型。
这是来自香港中文大学、香港科技大学和华为诺亚方舟实验室的最新研究成果——针对自动驾驶街景的可控3D场景生成方法“MagicDrive3D”。
此前,采用常见的2D自动驾驶数据集来生成3D街景的方法不是没有,但受采集角度所限,生成结果的可控性和几何一致性无法同时满足。而现在,MagicDrive3D通过结合可控生成与场景重建解决了这一限制。
不仅支持多条件控制,还突破了原始数据的局限,即使在原始图像不一致的情况下,也能建立出连贯的高质量模型。

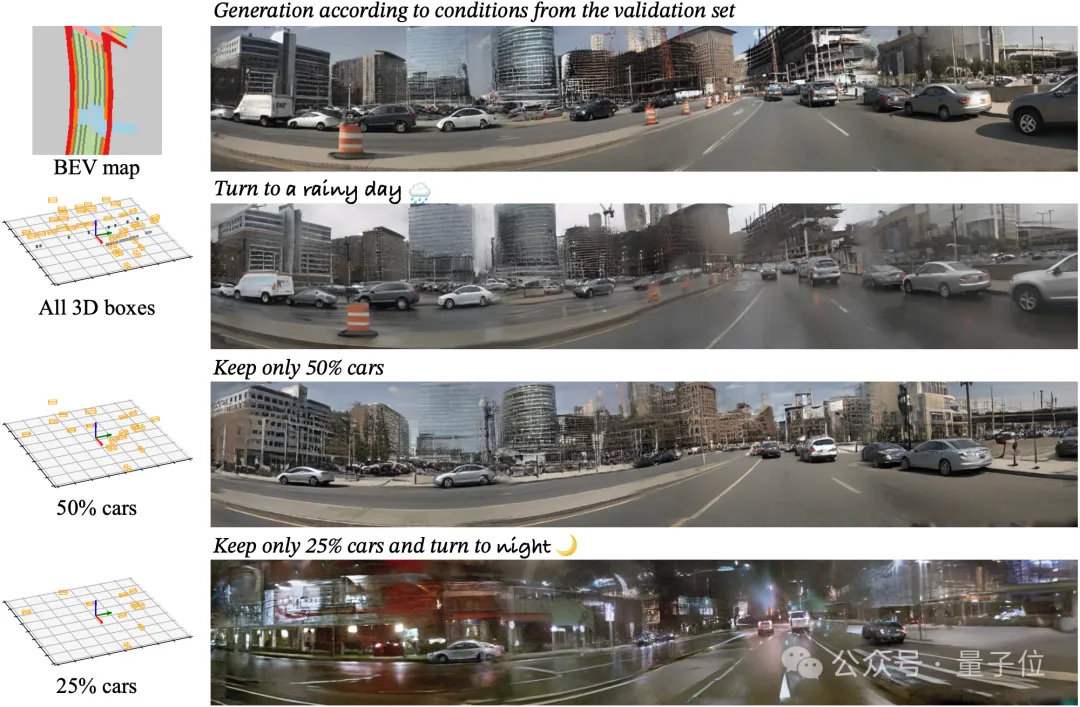
即使场景中有很多物体,生成结果依然真实可靠:
而且支持天气情况的文本控制,可以一键从晴天切换到雨天:
道路结构、物体位置都能够精确控制(随机保留50%车):
还可以一键实现白天与夜晚的转换(随机保留25%车):
总之,这项成果解决了自动驾驶等无边界场景下3D场景的高质量模型开发难题,可以有效帮助BEV分割等下游感知任务。
常规驾驶数据即可实现可控场景生成
3D自动驾驶场景生成应用广阔,然而目前3D资产的生成方法通常局限于以物体为中心的生成场景,对于自动驾驶中无界限的大场景生成缺乏探索。
但从应用的角度来说,可控的生成方法在下游应用中价值更高,针对这个痛点,MagicDrive3D提出了一种新颖的框架,在常规的自动驾驶数据集上即可训练出3D场景生成模型,而且支持多种条件控制!
MagicDrive3D继承了前一代MagicDrive诸多优点,其多条件控制可以实现场景、背景和前景的多层次街景图像编辑,用来生成更多的自动驾驶3D场景。

△MagicDrive3D 的多视角渲染能力
而且生成的场景支持多相机视角的渲染,例如全景图渲染:
在目前应用最广泛的nuScenes数据集上,MagicDrive3D在视频生成和场景生成两方面相比于baseline,均表现出明显优势。
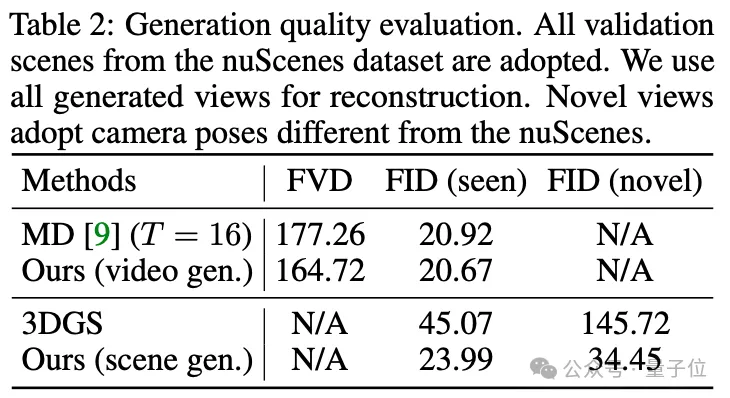
△MagicDrive3D的生成效果评估
此外,MagicDrive3D生成的图片还可以直接用于数据增强,可以在BEV分割任务中提升相机参数的鲁棒性。
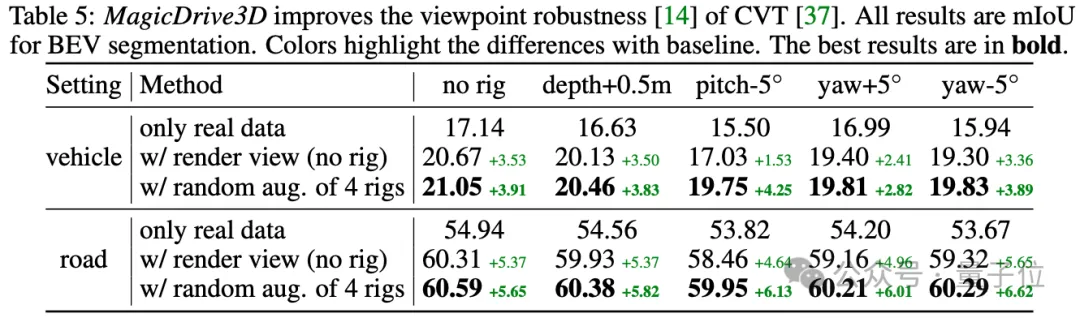
△MagicDrive3D的生成数据在下游任务的效果
那么,MagicDrive3D究竟是如何做到的呢?
先合成,再重建
随着扩散模型的发展,图片、视频生成的方法层出不穷,但是受限制于现有的数据采集形式,这些方法只能生成固定的相机视角,对场景几何缺乏建模(geometry-free),因而无法拓展到更多视角。
能够支持多视角的重建方法,虽然能够提供几何一致性的保证(geometry-focused),却又受到了真实采集的数据(静态、多视角数据)的限制,常见的自动驾驶数据集根本无法满足这些要求。
为了填补这部分空白,MagicDrive3D提出了一个将视角合成方法与场景重建方法相结合的框架。
该框架充分利用前者的可控性以及后者的几何一致性,实现了接受多种控制条件的3D街景场景合成。
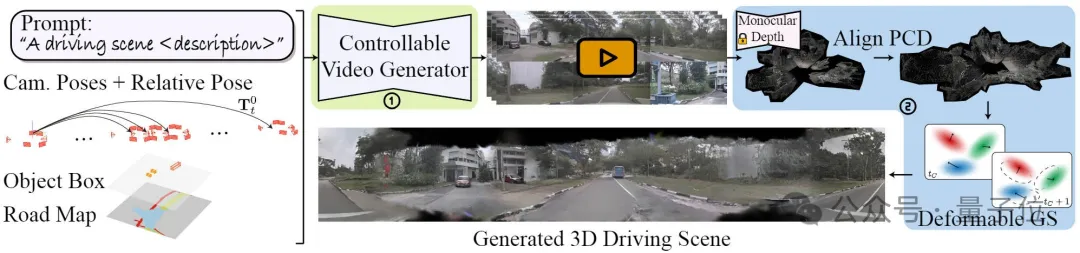
△MagicDrive3D的方法框架
具体来说,MagicDrive3D首先训练了一个细粒度可控的视频生成模型,不仅能够通过语义信息控制,视频中每个视角的相机参数都经过统一坐标系编码,使得生成的多视角视频具备更强的几何一致性。
接着,为了提供更强的几何一致性保证以及多视角渲染,MagicDrive3D提出可形变的高斯泼溅作为场景的3D表征,结合单目深度点云进行重建。
最终得到的驾驶场景能够合理的反应各种控制条件,并且支持任意相机视角的精确渲染。
总的来说,MagicDrive3D带来了一个全新的、高效的可控3D场景生成框架,不仅成功解决了无界限的3D场景生成难题,其可控性更为多种下游任务提供了支持。
相比前序工作MagicDrive,MagicDrive3D不仅提供了多视角渲染能力,生成的场景几何信息也为更多样的场景编辑提供可能。
随着质量和真实性的提升,生成数据将得到更广泛的应用,为自动驾驶技术的发展注入更多活力。
论文地址:
https://arxiv.org/abs/2405.14475
项目主页:
https://gaoruiyuan.com/magicdrive3d/
- 只改2行代码,RAG效率暴涨30%!可扩展至百亿级数据规模应用2025-06-21
- 清华大学研究团队测评:夸克AI与志愿填报专家专业水平相当2025-06-21
- 百度启动最大规模顶尖AI人才招聘,岗位招聘同比扩大60%2025-06-15
- 金融大模型升级决策平台!马上消费发布天镜3.0破解经验碎片化难题2025-06-06

相关阅读

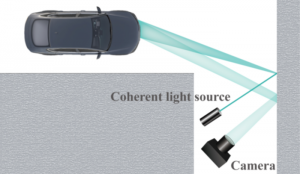
用AI实现隔墙“透视”,准确率达97%,这家中国公司研究入选CVPR
一家来自中国的AI创业公司合刃科技,尝试用墙壁散射的光去复原被遮挡数字,正确率最高能达到97%,整个过程不需要1秒,更适合用在需要实时处理的自动驾驶。