地平线城市NOA首发:征程6平台,自研端到端算法,已进第一梯队
智驾硬件Tier 2一哥地平线,为啥「越俎代庖」搞起了算法软件?
贾浩楠 发自 副驾寺智能车参考 | 公众号 AI4Auto
地平线“颠覆”地平线。
新智驾硬件征程6系列发布,远远超出了“硬件”范畴:
首次同时发布了一整套基于征程6的高阶智驾方案,基于端到端和数据驱动的技术范式。

创始人余凯博士给出的评价是:拟人化、真可用。
智驾硬件Tier 2一哥地平线,为啥「越俎代庖」搞起了算法软件?余凯这么解释……
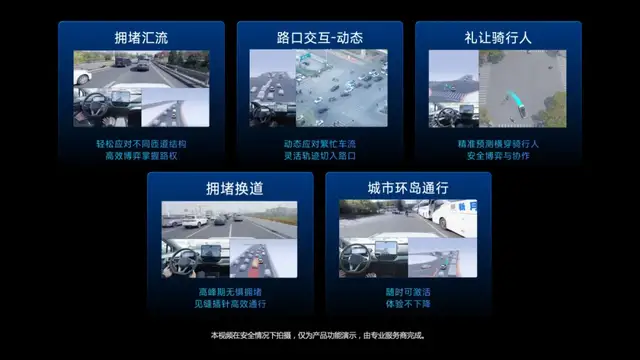
SuperDrive首秀:老司机般的熟练度
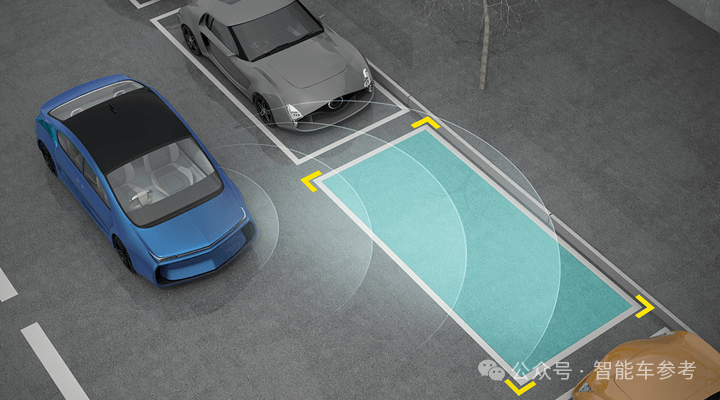
SuperDrive官方定义为“全场景”高阶智驾解决方案,也就是在功能上覆盖高速NOA、城市NOA以及自主泊车等主流智驾场景。地平线希望通过打造基于征程6的高阶城区智驾软件行业标杆,发挥示范效应,牵引高阶落地。
不过官方重点展示的是城市NOA,因为2024年高速NOA、自主泊车场景挑战已经不大。谈高阶智驾的普及、痛点等等问题,都是围绕城市NOA展开,更是所有玩家竞争决胜的焦点。
高速 NOA 中的困难场景,如拥堵汇流等,也是城区场景的常见场景。
这个场景中除了避让行人,挑战更大的是不规则路口右转。
路面的自行车道和机动车道之间没有明显间隔,从HMI界面中看到,系统凭一小段不连续栅栏就准确识别了可通行区域。
避让的过程,地平线形容为“优雅”,也就是没有急促的刹车、猛打方向这样的动作:
这说明在感知和规控两个层面,SuperDrive的实力都很强。
比避让目标更加复杂的,是环岛的驶进驶出,分成两个片段解析:

完成了这么几个厉害的动作:
环岛入口被大客车违停挤占,绿化带进一步侵占可通行区域,SuperDrive不拘泥于地上划线,灵活绕行,这是通行效率的体现。
安全性上,SuperDrive进环岛同时,还避让了一辆低速两轮车。
环岛中通行时,妥善避让了一对在路中央停车落客的行人。
第三个场景绝对算是高难度corner case,毕竟在环岛里面停车上下乘客的“迷惑操作”,实在太危险也很罕见。
这里面还有一个感知上的难题。以往“白名单”机制做感知的智驾系统,可以识别单独的车、单独的人,但“人在车边”往往会成为系统的盲点,由此也引发过被广泛关注的事故。
驶出环岛的路口,有大量逆行的自行车:

SuperDrive在这个场景下的表现,说明地平线已经突破了过去以规则驱动为主的自动驾驶技术体系。
最后再来看看SuperDrive表现最惊艳、最重要的场景——变道。
旁车道空间不足,多数系统会放弃变道或减速等待,但SuperDrive能根据前方空间条件主动加速,创造变道机会:
以及在密集的车流中,对于转瞬即逝的变道空间,SuperDrive“瞅准机会”干净果断完成变道:

其余的像是向快车道变道、汇出汇入变道等等手到擒来,对SuperDrive基本不构成挑战:
为什么把变道这个看似简单的功能重点强调?
因为用这在技术体系上,变道是直接区分水平高下的试金石;用户层面,它是智驾“可用”与否最关键的因素。
简单说,现在市面上几乎所有量产交付的“高阶”智驾系统,在变道的规划和执行层面根本不是神经网络,而是人工手写定义的规则:十分缓慢的速度、十分平滑的角度切入。
很谨慎很礼貌,但问题是,道路上很少有人愿意主动让行,尤其是节奏快的一线城市。
这就造成各种发布会上“遥遥领先”的智驾系统,在城市环路、多车道穿行场景下变得“弱智”:
因为“不跟慢车”的逻辑频繁做出变道决定,又因为僵硬刻板的变道方式屡试屡败,最后只能提示接管…
或者是在环路、高速出口一边蠕行一遍等变道机会,最终还是错过出口。
智驾体验支离破碎,本来是让你减负的系统,现在让你更加费心费力的监督矫正。
问题就出在不够拟人,很难在复杂交通流下与多个不同交通参与者协同
地平线余凯博士是行业内第一个站出来戳破“皇帝新衣”的人,对当下量产城市NOA的评价是:怂、莽、急、贵,不可用。
这也是为什么智驾硬件供应商地平线要搞一套智驾系统:
用数据替代手写规则,让神经网络直接学习人类成熟司机的驾驶方法来应对复杂场景,找一条彻底解决城市NOA量产普及问题的路径。
具体方法是这样的…
SuperDrive如何达成更拟人的体验?
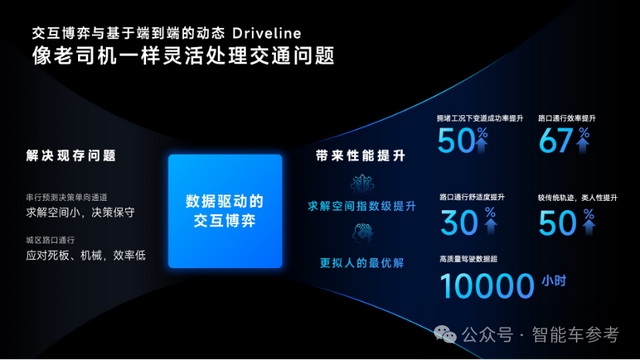
两个最主要的技术手段:端到端感知架构,以及数据驱动的交互式博弈算法。
一个是为了智驾系统看的更清楚更明白,一个是让智能代驾的“脑子”更灵活更高效。
端到端感知架构的优势,是避免了模块化算法架构中,数据多级传递造成的“损耗”,算法模型一端直接输入传感器数据,另一端直接输出轨迹预测,包括本车的,也包括道路其他交通参与者的。
端到端体现在SuperDrive将动态、静态、OCC(Occupancy占用网络)三网合一,统一在一个Transformer架构下,不需要对感知数据进行抽象和逐级传递,“所见即所得”:实现感知端到端同时,又保证了每个子网络的可解释性。
实际上SuperDrive的算法基础,正是来自于智能车参考前几天刚介绍过的CVPR 2023最佳论文成果——UniAD,地平线学者一作。
动态、静态、Occupancy三网合一的感知端到端架构下,有效解决感知架构时延高、规则多、负载重的问题。

感知端到端网络输出的结果,会接着进入数据驱动的交互博弈算法,这一算法也是基于蒙特卡洛树搜索的端到端深度学习算法。
名震一时的围棋AI AlphaGo背后的主要技术之一就是蒙特卡洛树搜索。简单来说,它的基础是一个概率模型,所要求解的问题是某种事件出现的概率。
在智驾场景中,这个“概率”可以是对象来车轨迹、前车变道意图、变道时多个目标的运动轨迹等等…
蒙特卡洛树搜索会通过某种“试验”的方法,得到这种事件出现的频率,或者这个随机变数的平均值。
试验方法,可以是人为定义,不过地平线选择的是通过10000小时高质量驾驶数据来训练,让算法最大程度理解效仿人类老司机的驾驶方法。
这就是上面例子中SuperDrive果断干脆变道的技术核心。
算法之外,SuperDrive“拟人化”体验仍然离不开地平线软硬结合的实力——最新发布的征程6系列计算硬件,CPU、BPU、GPU、全功能的MCU四芯合一。
单颗征程6旗舰即可支持感知、规划决策、控制、座舱感知等全栈计算任务。同时,高集成度令开发难度进一步降低。
SuperDrive搭配征程6旗舰版,BPU纳什架构是核心:
独特设计三级片上存储架构,核间高效协同,极致优化大参数下的带宽瓶颈;
具备多脉动立方加速引擎,灵活的引擎间数据流动实现高能效且低带宽占用;
数据变换引擎,灵活支持Transformer细小算子;
浮点向量加速单元,具有通用、灵活的特性,满足关键算子精度需求;
紧耦合异构计算单元高效加速不同类型数据处理;
核内、核间、片间高效灵活的多向数据流动,实现计算动态调度与灵活调优;
虚拟化技术,透明式提升多任务并行处理能力;数据驱动功耗优化,针对神经网络数据动态范围特性,降低功耗30%。
征程6系列目前一共6款产品,征程6B、征程6L、征程6E、征程6M、征程6H、征程6P。覆盖各个区间智能驾驶需求,算力依次递增,从数十TOPS一直到数百TOPS。
地平线认为,一个时代有一个时代的计算架构。地平线BPU架构的最新进展,其实就是数据驱动的智能计算架构,支持智能算法软硬件体系相结合。
在此基础上诞生的SuperDrive,其实也没有突破颠覆地平线智能汽车Tier 2的定位本质:
可以量产交付,但更重要的是实践端到端和数据驱动的新技术范式,以及验证征程6对这种技术体系的完美支持。
地平线「破壁」城市NOA
SuperDrive当下最珍贵的价值也是这点:
向行业、用户证明只有在技术体系上重构、变革才能彻底解决城市NOA量产普及问题。
试图在以前的技术栈上修修补补,通过增加规则用“穷举法”兜住所有长尾场景,是一条死路。最终只会留下一堆“屎山”代码和泛化性极差的系统。
用户用过几次就劝退的系统,只会成为白白浪费的成本,规模普及无从谈起。
因为对于城市NOA来说,智能不彻底,就是彻底不智能。
尽管SuperDrive推出,地平线凭技术体系和功能体验拿到了城区NOA智能驾驶的门票,并且站稳第一梯队,但它定位仍然是Tier2,只不过毫无疑问是最全能的Tier2。
SuperDrive因此成为一个样板间,目的是带动车企、tier 1尽快向新的技术范式转移,实现这个目标的基础,是新的征程6系列。
而从行业格局来看,地平线推出软硬一体的智驾方案有更深刻的意义:生态正在成为智驾壁垒和护城河。
这体现在自动驾驶正在以底层硬件不同,演化出不同阵营。通用GPU演变过来的英伟达、电子通信领域延伸的高通,以及自主玩家地平线。
地平线的的优势,恰恰是没有过往优势业务的惯性,从智能车和自动驾驶算法演变的角度设计硬件架构,并且在大模型浪潮中,前瞻性的提出专门为端到端模型和数据驱动算法服务的新平台。
除了自给自足生态封闭的特斯拉以外,地平线征程6是目前唯一的选择。
而智驾底层硬件“三分天下”,还能从商业角度解读出趋势:
地平线坚持Tier2,选择和所有自动驾驶算法公司共赢。而所有的自动驾驶公司也成为了地平线生态护城河的一部分。
而在在中国所有的智能汽车供应商中,服务能力,客户广度,商业潜力…地平线是所有玩家中独一无二的。
- 哈弗全面押注四驱!新能源全系标配Hi4技术,两驱价格享四驱性能2025-04-27
- 中国首款自研V8+上车坦克300虎克版,硬核越野布局全球市场2025-04-27
- 上海车展L4商业化黑马:最强芯片激光雷达同时上车,全无人可换电2025-04-25
- 「千匹马力」被比亚迪打成白菜价:最新汉唐21万起售,比小米SU 7Ultra更小米!兆瓦闪充高阶智驾都标配2025-04-10