意念操纵机器人成真!李飞飞团队打造,做家务玩游戏样样能行
网友:阿凡达照进现实
西风 发自 凹非寺
量子位 | 公众号 QbitAI
斯坦福李飞飞、吴佳俊带队让《阿凡达》意念操控照进了现实!
现在,只需要动动脑子就能操纵机器人。
想吃寿喜锅不用自己动手,切菜备菜、倒入食材,机器人一气呵成:

做饭、烹茶样样都行:
忙完还能顺便把桌面清理了:

你以为这就完了?这个机器人玩起游戏来也是一把好手:

甚至还能帮你熨衣服:
关键是,旁边的操纵者只需要坐在那里“冥想”即可,无需手摇摇杆。
能做到这些,都要得益于研究团队最新开发脑机接口系统——NOIR。
这是一个通用的智能系统,使用者无需佩戴侵入性设备,机器人可以从脑电信号中解码人类意图。
并且它还配有一个“技能库”,可以随意组合各种技能完成人类指令,轻松应对高达20项日常任务。
要知道,常规脑机接口系统一般只专注于一项或几项任务。
目前这项研究已收录于机器人顶会CoRL 2023:
围观网友一口一个哦买噶:
哦买噶,游戏规则改变者!

清华叉院助理教授许华哲也来评论区捧场:
哦买噶,赛博朋克!

这个NOIR系统究竟是什么?机器人为何能完成这么多任务?
20项任务轻松拿下
正如上文所说,这个机器人能干的事儿多着呢。
干酪撒粉这种任务也能轻松完成:

拆包裹、整理桌面这种活就更不在话下:


而其背后的这个NOIR系统,简单来说可以分为两部分:模块化解码管线、有原始技能库的机器人系统。
主打一个让机器人自动学习预测人类意图。

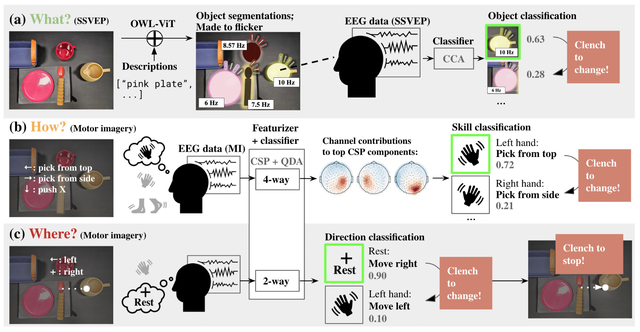
具体来说,模块化管线将解码人类意图过程分为三个模块:
1)选择什么对象?
方法是在屏幕上显示任务场景,利用对象的闪烁刺激产生SSVEP信号;每个对象以不同频率闪烁,人类注视某对象时,脑电信号中该频率成分增强。
然后用Canonical Correlation Analysis(CCA)方法,分析不同频率的相关性,确定人类注视的对象。
2)如何交互?
这部分是通过提示人类想象执行某些技能(左手、右手等)产生运动意象信号,然后使用滤波和Common Spatial Pattern (CSP)算法预处理信号。
最后利用Quadratic Discriminant Analysis (QDA)进行4类识别,确定技能选择。
3)在哪交互?
人类想象控制光标的左右运动来选择技能执行的具体参数。同样通过CSP和QDA处理并解码脑电信号,判断人类是左还是右。
研究人员还设置了安全机制,采用肌肉紧张信号来确认或拒绝脑电信号解码结果,避免解码错误导致的风险。
之后,机器人配备了一系列参数化的基本技能,例如Pick(x,y,z)、Place(x,y,z)、Push(x,y,z,d)。
可以组合使用这些技能来完成人类指定的各种任务。

在这个过程中,解码人类意图既费时又费钱。所以研究团队选择让机器人用基于检索的少样本学习,来学习人类的对象、技能和参数选择。
这样一来,在给定一个新的任务时,机器人会在记忆中找到最相关的经验,并选择相应的技能和对象。
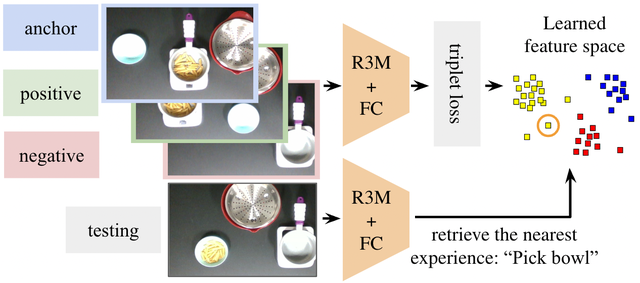
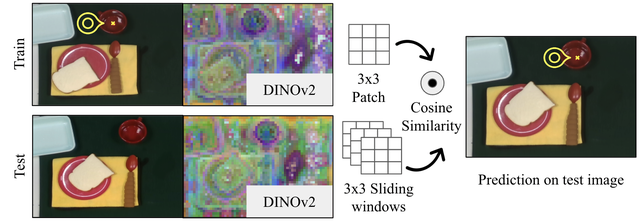
举个例子,假设人类在执行抓取杯子的任务,选择了在杯子的某个特定位置抓取(比如杯子的把手)。机器人会记录下当时的图像,以及人类选择的抓取点。
在之后的任务中,当机器人看到新的杯子图像时,它会首先根据预训练模型来分析这个新图像,提取图像的语义特征。
然后计算新图像的特征和之前记录的训练图像特征之间的相似度,找出最相似的一个点,作为它预测的抓取位置。
通过这种匹配图像特征的方式,机器人只需要人类示范一次参数选择,就可以在未来自己预测参数,而不需要人类每次都完全重新选择一遍。
使用NOIR系统,3名人类参与者完成了上面我们所介绍的20项日常活动任务,其中包括16个桌面操作任务和4个移动操作任务。

在测试中,每个任务平均需要尝试1.8次就能成功,平均完成时间为20.3分钟,这其中主要是人类决策和解码耗时,占总耗时的80%。

实验各阶段的解码准确率和其它脑机接口研究差不多,但使用这种方法可以将对象和技能选择时间降低60%,从45.7秒缩减到18.1秒。

作者简介
除了李飞飞教授、吴佳俊教授带队,论文共同一作有四位,分别是:
Ruohan Zhang
Ruohan Zhang是斯坦福视觉与学习实验室(SVL)博士后研究员,同时也是Wu Tsai Human Performance Alliance研究员。
主要研究方向为机器人技术、人机交互、脑机接口、认知科学和神经科学。
Sharon Lee

Sharon Lee是斯坦福大学视觉与学习实验室(SVL)研究生研究员。
Minjune Hwang

Minjune Hwang是斯坦福大学计算机科学研究生,于加州大学伯克利分校获得计算机科学和统计学本科学位,曾在亚马逊、微软和苹果进行研究。
Ayano Hiranaka
斯坦福大学研究生,本科毕业于伊利诺伊大学香槟分校。
论文链接:https://arxiv.org/abs/2311.0145
参考链接:
[1]https://twitter.com/drjimfan/status/1722674119794434187
[2]https://twitter.com/ruohanzhang76/status/1720525179028406492