小米自动驾驶能力逐帧解析,雷军33亿花得值吗?
小米自动驾驶核心团队,来自于去年收购的创业公司
贾浩楠 发自 副驾寺智能车参考 | 公众号 AI4Auto
来了来了!
小米汽车,最最关键核心进展:自动驾驶能力,首次公开展示!
30项能力亮点,雷军总结成小米汽车500天的初步答卷:
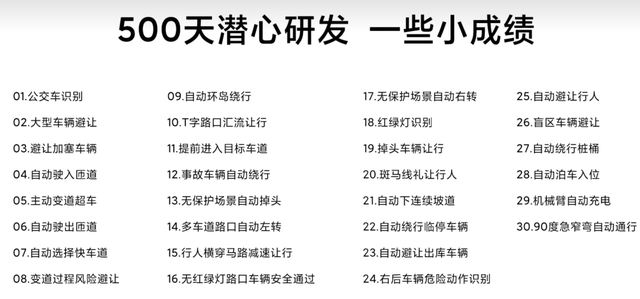
你说是吹牛也好,自信也好,反正雷军已经预定:2024年自动驾驶冲到第一梯队。
到底是什么样的能力?关键亮点详细解析奉上。
8分钟,小米展示了什么?
高速、城市、泊车三域都有,而且亮点不少。
首先是高速场景,基本的车道保持、定速巡航这类L2功能平平无奇。
小米自动驾驶的亮点,在于突破了简单的“辅助”,已经具备了主动选择车道、进出匝道,并线超车等等功能。
自主上下高速——背后是高精地图
高速场景下,车辆可以实现自主上下匝道。
这个单一的功能,其实背后代表着小米自动驾驶采用了和高精地图联通的方案,车辆行驶过程中的微操,比如避让、刹车、方向等等,由车端传感器和计算平台完成。
但路线规划、进出路口、上下高速这些决策层面的能力,则离不开高精地图的支持。
当然,高精地图信息是给系统提供大的路线规划,以及道路突发情况,实际行驶中,依然需要传感器和定位模块“告诉”系统现在处于怎样的场景中。
这也表明在不同传感器数据融合方面,小米也取得了进展。
高速自主并线超车
这一部分其实可以拆分成两个动作。
大的层面,是系统AI高速场景下会自主选择快车道通行。也就是说从匝道进入高速后,必然伴随着变道超车的动作。
但是快车道策略没有透露,也就是还不清楚小米自动驾驶系统会提前多久准备变道出高速,也不清楚快车道有低速目标阻拦时,系统会做出什么样的反应。
而在变道过程中,免不了遇到突发情况,避让策略就很关键:
从展示出的场景中可以看到,系统正要变道时,前方既有低速大车,后方又有速度很快的连续变道车追上来。
仅从这一个案例来看,小米自动驾驶系统的策略十分得当:先是稍微减速拉开前车车距,然后等待后车超过后再变道。
整个过程没有退出接管,也没有急刹车、猛打方向等等动作。
这也说明系统比较“老司机”,没有一味谨慎避让,也没有过于激进的驾驶风格。
无保护转弯最难场景:掉头
高速路况较为清晰单一,考验的更多是策略。
而真正考验感知、识别、预判的,是城市道路。
小米的demo中,出现了一个此前没见友商演示过的场景——无保护自主掉头:
这里的难点,在于目标车道并没有红绿灯的阻拦,时刻有车辆通过。所以在数据层面不止要求前向摄像头,还需要环视能力。
在系统后台,则需要从几个不同摄像头2D数据中还原重建3D场景。
避让目标
分两种:避让静止目标,复杂路口通行。
首先是绕行占道的事故车:
人车混行,且没有红绿灯的复杂路口,系统也能顺利通过:
不过这里的刹车动作,显然比高速场景下来得更猛。
而在有红绿灯的路口,系统也能根据交通信号做出合理动作:
自动进出环岛
这是一个半径较大,曲率也比较平缓的环岛。
顺利进出,其实现在并不是一项难度很高的挑战。
真正考验技术的,是系统对整个环境的构建,核心是传感器精度能不能探测到更加低矮且颜色不一的各种中央环岛路基,或者是系统对不同曲率弯道中车速、姿态的控制,能不能保证乘坐舒适。
而这些,恐怕只有到量产交货那天才能知道。
不过,环岛场景也有独特意义。进出环岛,包括前面的掉头行为、识别红绿灯,都说明小米自动驾驶系统在城市场景下也实现了基于高精地图的高阶领航辅助功能。
与下半年即将上车的小鹏城市NGP,毫末NOH,特斯拉NOA等等性质相同。
自主泊车,还能自主充电
小米展示的,并不是常规的识别车位泊入,而是从停车场入口就开始的记忆泊车功能:

也就是说,系统需要先对整个停车场结构进行感知,然后构建一个数字孪生,并记住通往车位的路线。

在行进过程中,需要对来往的车、人目标做出实时避让。
从HMI界面中,能清楚的看到系统准确识别了锥桶、车辆、立柱、摩托车等等不同目标。
而且,在主要目标上,系统还实时标明了和本车的距离以及速度信息。
低速情况下识别静止目标并不算太难,但依然需要融合摄像头、激光雷达、毫米波雷达等等不同传感器的数据。
而且由于地库光线条件的原因,雷达的冗余作用会更加凸显。
倒车入库没什么稀奇的,但不同的是小米展示了一个能自由移动的汽车“充电宝”:

有啥不足?
小米自动驾驶不可能完美无缺。
通过前面的分析,我们已经知道很多场景并不是通过就算合格,真正考验技术的难点,小米都没有透露。
比如避让故障车的场景中,其实有一个疑点。
视频中显示的绕行借道,是在虚线情况下完成的。事实上,这条道路也只有在借道这一段是虚线,“故障车”很巧的就抛锚在这里,而且没有占满整个车道。
而在实线甚至双黄线情况时,如何处理小米并未展示。
另外,一眼就能看出的不足是,小米自动驾驶系统在城市道路中“谨慎”远远大于“自信”,跟车距离过长,塞下一辆轻卡都没问题。
这也造成小米自动驾驶测试车在路上频繁被加塞。
而且,遇到突然加塞、行人横穿马路等等情况,会有一个较为猛烈的刹车,然后原地迟滞一两秒才能继续行驶。
但不管怎么说,小米展示出的自动驾驶,起点不低。
高速领航辅助、城市领航辅助、自主泊车三域,都有亮眼的表现。
其中高速领航辅助,第一梯队主机厂、自动驾驶公司已经量产实装,今年下半年争夺的焦点则是城市领航辅助。
至于自主泊车各家都有,水平体验各不相同,小米展出的能力,至少和小鹏汽车持平。
而这三域的融通,则是行业大部分公司划定的交卷指标,时间点在2025年。
如果小米汽车2024年量产按部就班,说明雷军早就规划好小米汽车登场即L3,在高阶战场和新势力、华为、特斯拉竞争。
小米自动驾驶,什么方案?从何而来?
小米自动驾驶测试车,在开放道路场景使用的是比亚迪汉EV。
泊车场景使用的是宝马3系。
都只作为技术验证,为小米提供线控底盘。
具体方案,能看到的是车身四周都布满了摄像头,覆盖360°,车顶有一个高举的激光雷达。
其余的传感器、底层算力一概不知。
雷军说这是小米汽车500天的成果,其实此言差矣。

小米汽车自动驾驶核心团队,来自于去年收购的自动驾驶创业公司深动DeepMotion。
DeepMotion 2017年创立,核心团队从微软亚研院走出。去年成为小米子公司时,据称已经基于视觉成功开发出多传感器融合感知模组、高精地图自动化构图、高精度定位等技术方案。
所以小米自动驾驶,其实和行业客观规律相符,也是研发了四五年的成果积累。

首秀之后,引起了怎样的反响?
质疑的不少,而且是在小米官方账号下毫不留情:
质疑主要是现在新势力大部分的自动驾驶 ,都来自于百度Apollo当年的开源。
另外,小米自动驾驶HMI也被质疑是后期动画渲染出来的:
当然,赞赏的也有。不过最多的,还是期待雷总能带给年轻人他们第一辆智能车。

小米汽车,雷军最新剧透
小米汽车的实际进展,包括人才、资金、专利等等,智能车参考之前都有过详细介绍。
这回我们只看雷军亲口说的新信息。
雷军首次官方披露部分技术与人员的筹备细节。
具体来说。小米在自动驾驶领域首期投入33亿元研发费用,组建超过140辆测试车队。

目前团队规模超过500人,同时通过全资并购以及对上下游企业的产业投资等方式,推进在自动驾驶领域的中长期产业布局。
我们关心的可能是“年轻人第一辆”,但雷总可不这么看。
“穿越低谷,押上声誉”的造车大业,雷军认定:自动驾驶就是核心竞争力。
雷军透露小米自宣布进军智能电动汽车行业之后,首先从技术难度最高的自动驾驶领域切入,通过重金投入、组建顶级团队,以及产业投资的上下游布局等三大举措,实现了从零到一的起步。

今年年底自动驾驶团队整体规模预计将突破600人,其中由50位顶级专家组成骨干团队,博硕占比超过70%,涵盖了传感器、芯片、感知规控算法、仿真技术、高精地图、高准定位、工具链、训练能力等自动驾驶全栈技术所需人才。
核心骨干成员大多拥有微软、谷歌等背景。
雷军年度演讲,把造车大业、自动驾驶放到了“One more thing”,显然是把小米汽车作为未来的重头戏。
而据智能车参考得到的消息,雷军目前的全部精力,几乎都投在小米汽车项目。核心手机业务,现在只做战略和规划层面的指引,具体工作则由曾学忠全盘负责。

对于造车,雷军确有“破釜沉舟”之势。
自动驾驶进展之后,雷军放言未来两年,小米汽车不再披露进展,不再辟谣流言蜚语。
一切悬念,2024年交货揭晓。
- 哈弗全面押注四驱!新能源全系标配Hi4技术,两驱价格享四驱性能2025-04-27
- 中国首款自研V8+上车坦克300虎克版,硬核越野布局全球市场2025-04-27
- 上海车展L4商业化黑马:最强芯片激光雷达同时上车,全无人可换电2025-04-25
- 「千匹马力」被比亚迪打成白菜价:最新汉唐21万起售,比小米SU 7Ultra更小米!兆瓦闪充高阶智驾都标配2025-04-10