韦丽雪 发自 副驾寺
智能车参考 报道 | 公众号 AI4Auto
人类司机开车,陌生的路开多了自然就会熟练。
自动驾驶开车,需要大量的学习和训练。
这就离不开提供“训练场地”和素材的庞大数据集。
此前,Waymo拥有最大的2D自动驾驶数据集。
不过现在,华为诺亚方舟实验室联合中山大学发布了新一代2D自动驾驶数据集SODA10M。
比Waymo现有的大10倍。
包括了1000万张无标注图片以及2万张带标注图片。
除了大,这个数据集还有什么不同?
数据集从哪里来?
SODA10M数据集收集了不同城市在不同天气条件、时间段以及位置的场景。
晴天雨天、白天夜晚、城市高速园区……
更重要的是,覆盖面很广。
1000万张无标注图片来自32个城市,囊括了国内大部分地区。
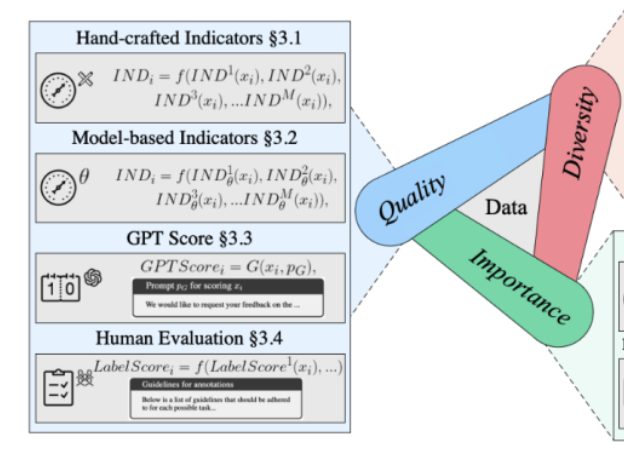
2万张带标注的图片,直接标出了6种主要的人车场景类别,分别是:
Pedestrian、Cyclist、Car、Truck、Tram、Tricycle。
具体是怎么操作的?
华为通过众包方式把采集任务分发给上万名出租车司机。
由出租车司机使用手机或驾驶记录仪(1080P+)采集图片。
你以为随手拍个照片就完事?
还要以每10秒一帧的速度,在不同的天气条件下采集图像。
地平线需要保持在图像的中心,遮挡汽车内部不能超过15%。
对收到的图像还会随机选择其中的5%,进行手工验证。
合格率低于95%将退回。
针对涉及隐私的信息,例如人脸和车牌等都会进行模糊处理。
最大数据集有啥用?
华为用已标注的训练集(2万张带标注的图片),搞了一场自动驾驶的主流模型的大pk。
对象是全监督、半监督和自监督学习。
分为训练、验证和测试三个环节。
为了增加难度,最终测试选择的图片是上海白天晴天,而且是城市场景。
在验证这一环节,则包含了多种不同场景下的图片。
最终结果表明,仅仅通过全监督训训练出来的模型取得的效果并不好,全监督训练的结果夜晚与白天的精度差距大。
此外,华为还把Waymo自动驾驶数据集、现有的经典自监督算法数据集ImageNet拉来,和SODA10M的表现进行比较。
从这三项入手:
1、目标检测;
2、BDD100K(伯克利发布的大型开放驾驶视频数据集);
3、Cityscapes上的语义分割。
效果如何?
在Moco系列(城市景观语义分割),以及基于像素和中间层特征的自监督方法DetCo, DenseCL上,SODA10M自监督训练的效果与ImageNet相仿。
两者都明显优于Waymo。
这也意味着自监督算法上游的数据集大小,对于下游的学习和测试有极大影响。
据华为介绍,建立这个数据集主要是为了通过自监督学习,构建下一代工业级自动驾驶系统的方法。
此前,自动驾驶主要依靠训练过的视觉感知模型进行学习。
这类模型使用大量的数据标注,自动驾驶的安全性得到确保,但弊端也很明显。
自动驾驶系统会对此产生依赖,而且学得很慢。
半监督和自监督学习通过大型数据集,挖掘大量的无标记数据和少量的无标记数据,能够提升学习的鲁棒性。
所以建立一个足够大的数据集,成为了关键。
据悉,华为诺亚方舟实验室将基于这个训练集,开放2D自动驾驶挑战赛。
并且会从中评选出Best Paper Award。
奖金丰厚,感兴趣的朋友或许可以一战。
论文地址:https://arxiv.org/pdf/2106.11118.pdf
数据集:https : //soda-2d.github.io/index.html
— 完 —
智能车参考 · AI4Auto
关注我们,第一时间获知智能车最新动态