腾讯机器狗首次曝光!脚踩梅花桩,功夫很到家
一只能走梅花桩的机器狗
金磊 发自 凹非寺
量子位 报道 | 公众号 QbitAI
最近因为马老师,「中国功夫」话题甚是火热。
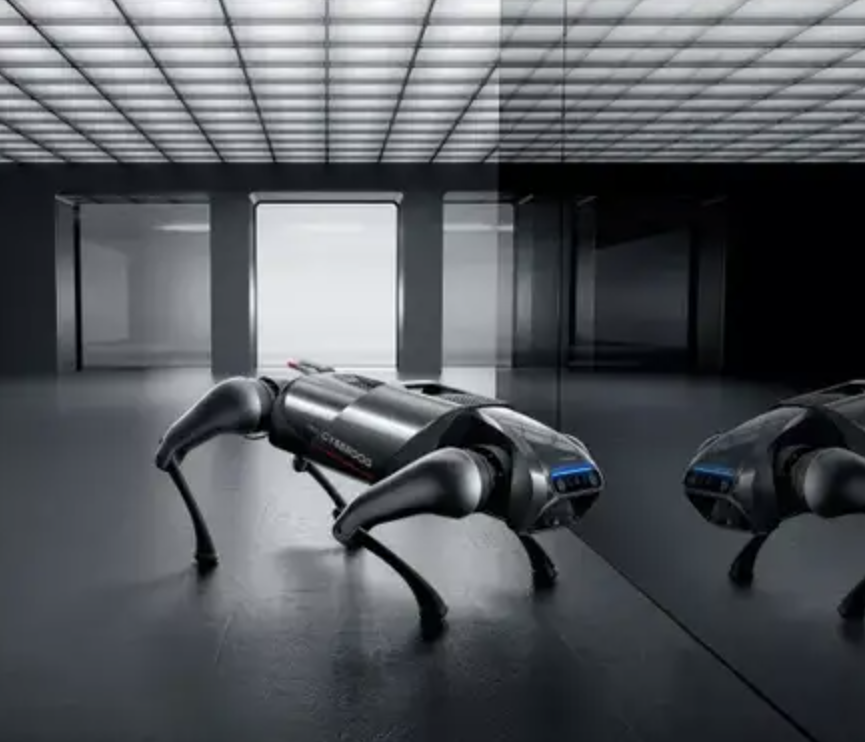
那我们今天就来看一只很有「武德」的机器狗——能跑、能跳,而且还能走梅花桩!
这只四足机器人名叫Jamoca,由腾讯 Robotics X 实验室打造,借用了云深处的硬件来承载系统技术。
Jamoca 是国内首个能完成走梅花桩复杂挑战的四足机器人,其工作进展属于移动方向上的技术突破,也是机器人最基础的能力之一。
话不多说,是时候展现真正的技术了。
梅花桩上迎来新「武者」
Jamoca的本体,是基于外部提供的硬件平台改装。
它的「三围」信息如下:
重约70公斤,长1米、宽0.5米、站高0.75米。
除了在外部构造之外,研究人员还为它打造了一个能应对复杂环境的智能大脑。
这个大脑就让 Jamoca 能行走、小跑和跳跃,并赋予了它「自主定位」和「避障」的能力。
OK,接下来我们就来看下,它要挑战的「梅花桩」长什么样。
据了解,这次要挑战的梅花桩高60厘米、呈20°斜面角度的台阶,邻桩最大高度差16厘米,并且间距不等。
其中,考验机器人移动能力的难点主要有两个:
- 理解梅花桩的排布(包括位置和高度)
- 选择最佳落脚点及路线并稳定精准地行走(落脚到梅花桩中心点)
然后这位「武者」就准备展示「真功夫」了。
从它挑战的结果看,Jamoca已经达到了极高的技术标准:
- 误差1厘米内的感知定位
- 根据环境进行的10毫秒级路线规划
- 基于动力学的1KHz实时力矩控制
- 梅花桩中心点1厘米内的落脚误差
- 以及全系统的高度协同
据腾讯 Robotics X 实验室研究员介绍:
和国际上其他四足机器人走木块的场景比较,此次 Jamoca 所挑战的梅花桩落脚面积更小、高度更高,并有台阶的组合,实现的难度要更大。
怎么打造这只「功夫狗」?
Jamoca展现的基本功,确实有够扎实。
而它背后的技术实力,也是非常够硬核了,主要体现在精准环境感知、最优运动线路规划和实时运动控制等方面。
在精准环境感知方面,Jamoca 创新性地实现了鲁棒的眼脚标定,并利用RGB-D相机对周围环境进行实时的感知。
通过特征点匹配的方式,对 Jamoca 自身的运动轨迹进行在线跟踪,并将基于视觉的定位信息与基于运动学的里程计信息和 IMU数据进行融合,提高了定位追踪的精度和频率。
同时,利用算法识别和提取出台阶和梅花桩的表面区域范围和中心点位置,将定位和识别的数据进行融合,从而重建出整个三维运动场景。
在最优运动线路规划和实时运动控制方面,Jamoca 基于感知系统实时感知到的机器人本体及梅花桩位置信息,基于质心动力学,实现在线的质心轨迹生成和落脚点规划。
在保证机器人的四条腿可以安全地踏到下一步的梅花桩的同时,优化出一条本体移动长度最短、综合耗力最小的运动轨迹,并且可以在线持续地进行上述运动规划。
同时,基于实时本体状态估计,Jamoca 能够结合质心动力学模型来构建优化问题,实时求解机器人足端所需的地面反作用力。
并结合反馈控制实现精准鲁棒的实时力控,可完成行走、对角小跑以及跳跃等的运动控制。
不同于预先设计好规则之后做重复的运动的工业机器人,Robotics X 实验室更关注机器人有意识、有判断的自主特性研究,目的就是:
要在有很大不确定性的动态环境里,能够实现机器人的自主判断、自主决策,并自主完成任务。
现阶段,Jamoca 主要用于实验室内部科研实验。
至于未来的应用场景,腾讯表示:
会考虑一些潜在的应用场景,希望最终能够服务于人,它的未来也非常值得期待。
- 全球首个无限时长视频生成!新扩散模型引爆万亿市场,电影级理解,全面开源2025-04-21
- 教育信创到底怎么选?能做到”无感切换”的只有C862025-04-21
- 清华张亚勤:10年后,机器人将可能比人都多2025-04-21
- 具身空间数据技术的路线之争:合成重建VS全端生成2025-04-21