逐!帧!揭!秘!终于能看清波士顿动力机器人的细节了
乾明 发自 凹非寺
量子位 报道 | 公众号 QbitAI
波士顿动力,逆天机器人的代名词。
每一次新的视频放出,机器人做出各种充满视觉冲击力动作,都会引起疯狂传播。
凭借敏捷的身姿和动物般的反应能力,它们做出了各种各样对于人来来说都非常高难度的动作。
这样的机器人到底是如何设计的呢?波士顿动力并没有对外披露太多。
现在,IEEE Spectrum给出了一部分答案。
他们扛着高速摄像机,进入了波士顿动力公司总部,将镜头对准了机器狗Spot和人行机器人Atlas。
不仅近距离清晰地记录下了这些机器人完成动作时的各种姿态,也进一步报道了这些机器人设计背后的逻辑。
而且, IEEE Spectrum也将他们用高速摄像机拍下的波士顿动力机器人,做成了可以交互的图像,用鼠标拖动就可看到这些机器人在完成这些动作的每一瞬间都发生了什么(网址附在了文末)。
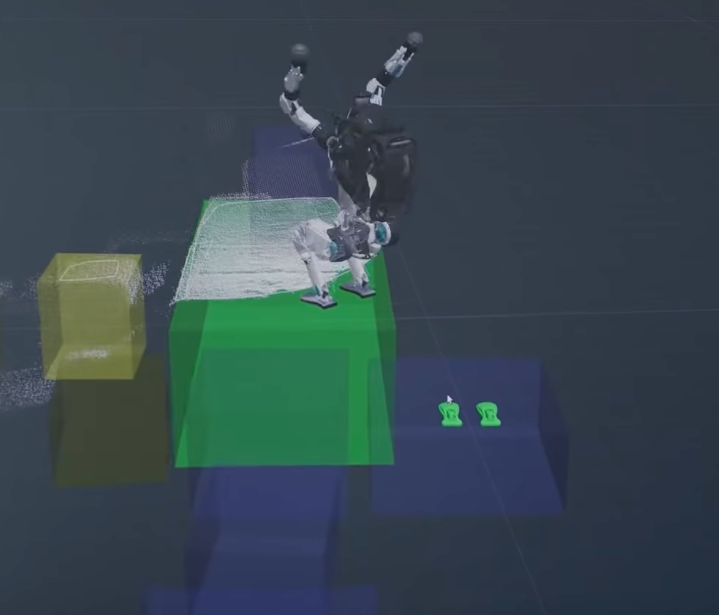
流淌着“红色血液”的Atlas
当你看到Atlas在敏捷的后空翻或者凌空劈叉的时候,你可能很难想象它重达80公斤。
这个高150厘米大块头,背后由28个执行器组成的液压系统驱动。
这些驱动器,基本上都是充满加压液体的圆柱,驱动活塞给机器人提供完成特定动作的爆炸力。
机器人的关键结构部件,都是使用工业级的3D打印制作,因此驱动器和液压管路被嵌入结构中,而不是由单独的组件制成。
而且,他们还开发了定制的伺服阀,比之前使用的航空领域使用的版本要小得多,而且更轻、效果更好。
虽然从外部很难看到,但Atlas的内部装满了液压驱动器以及连接它们的流体线。如果管道破裂机,就会流出“血液”——红色的液压油。
控制Atlas的时候,操作员通过手动控制器提供一般的转向操控,在这个过程中,机器人会使用其立体摄像机和激光雷达,来进行自我调整以适应环境的变化。
同时,Atlas还可以自主执行某些任务。比如它可以拿起带有特殊的条形码的箱子,进行码垛或者放到货架上。
进行移动的时候,它依靠整个身体来掌握身体平衡。
比如在跳过障碍物或进行杂技表演时,它摆动上身,并不是作秀,而是来推动自己,配合腿部的动作来更好的完成动作,就像运动员一样。
已经商业化的机器狗Spot
和Atlas一样,Spot的硬件基本上也是完全定制设计的。最核心的部位有两个:传感器和腿。
在机器狗的头部、尾部和侧面,都有传感器模块。
每个传感器模块中,有一对立体摄像头,一个广角摄像头和一个在弱光条件下增强感知的纹理投影仪。
在这些传感器的加持下,机器人可以使用SLAM的方法自主采取行动。
如果前面有障碍,它会自动选择绕过去;如果有楼梯,它会学着爬上去等等。
即使在有人操控的情况下,它也会自动采取这些行动。波士顿动力给出的说法,是这种方法更加稳定。
对于Spot的腿部,由12个定制的直流马达提供动力,从而使它能够前进、侧身和后退,最高速度可达每秒1.6米。
而且也能灵活地转动,适用各种地形,并能爬行、踱步等等,有效载荷达到14Kg。
在这些基本部件之外,我们通常看到的机器狗还会有一些“配件”,比如激光雷达:
但更加引入注目的是机械臂,拥有6个自由度,可以抓住物体:
或者是开门:
当前,这款机器狗正处于商业化的早期,只接受对外出租。
互动传送门:
Spotmini:
https://robots.ieee.org/robots/spotmini/
Atlas:
https://robots.ieee.org/robots/atlas2016/
参考链接:
https://spectrum.ieee.org/robotics/humanoids/how-boston-dynamics-is-redefining-robot-agility
- 滴滴副总裁叶杰平离职,他是出行巨头的AI掌门人,战胜Uber中国的关键科学家2020-09-07
- 董明珠的格力空调卖不动了:上半年营收同比腰斩,24年来首次被美的反超2020-09-01
- 手机配件市场上的“隐形巨头”:80后长沙夫妻创办,IPO首日市值逼近600亿2020-08-31
- 寒武纪半年报:每天亏百万,销售力度提升营收反降11%,上市高峰市值跌去40%2020-08-30