DeepMind提出新型神经网络架构,用无监督方法从视频中提取关键点 | 论文
用无监督的方法和寥寥数据,就能提取出关键点,在没有奖励的情况下,还能进行有效操控
铜灵 发自 凹非寺
量子位 出品 | 公众号 QbitAI
提取关键点此前被视为需要大量数据才能完成的工作,但DeepMind的一项最新研究可不这么认为。
DeepMind的新模型Transporter从原始视频帧中学习以物体为中心的抽象表示,并能用简单的算法生成控制策略和探索程序。
也就是说,用无监督的方法和寥寥数据,就能提取出关键点,在没有奖励的情况下,还能进行有效操控。
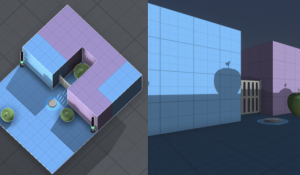
效果如下:
软件工程师@AwokeKnowing表示,DeepMind最后还严谨地讨论了研究的局限性,但这项在无监督、没有硬工程特征(hard-engineered features)环境下的研究,确实是一项开创性的研究。
新型Transporter架构
在论文Unsupervised Learning of Object Keypoints for Perception and Control中,研究人员提出了一种名为Transporter的新型神经网络架构,可跨各种常用的强化学习环境学习物体关键点的状态。
Transporter的架构如下:
研究人员在论文中表示,这个模型通过利用物体的运动来发现关键点,将原视频帧(xt)转换成另一个目标帧(xt’)。
这个学习过程分为三个阶段。
在训练期间,空间特征图Φ(xt)和Φ(xt’ )以及关键点坐标Ψ(xt) 和Ψ(xt’) 利用卷积神经网络和斯坦福此前提出的PointNet进行帧的预测,再次过程中,关键点的坐标被转换成高斯热力图(Gaussian heatmaps) HΨ(xt) 和HΨ(xt’)。
在transport期间,这个网络执行两种操作:
一是原帧的特征在HΨ(xt)和HΨ(xt’)中被设置成了0,二是在源目标图像中的特征位置HΨ(xt’)被替换成了HΨ(xt)。
在最后的改进阶段,研究人员又完成了两个任务,分别是在原位置绘制缺失的特征,和清理目标位置附近的图像。
研究人员将这些提取的关键点进行了可视化,并与T. Jakab和Y. Zhang等人此前的最先进关键点提取方法进行了效果对比:
T. Jakab等人研究:Unsupervised learning of object landmarks through conditional image generation.
地址:http://sina.lt/guuH
Y. Zhang等人研究:Unsupervised discovery of object landmarks as structural representations
地址:https://arxiv.org/abs/1804.04412
研究人员发现,Transporter学习了更多的空间对齐关键点,对不同数量、大小和运动的物体都有很强的鲁棒性。
使用学习的关键点作为状态输入,可在几种雅达利环境中实现比最先进的强化学习方法更好的策略,但只需要100k的环境交互。
DeepMind团队
这项研究来自DeepMind的Tejas Kulkarni, Ankush Gupta, Catalin Ionescu, Sebastian Borgeaud, Malcolm Reynolds,Andrew Zisserman和Volodymyr Mnih。
一作Tejas Kulkarni目前是DeepMind的高级研究科学家,此前在MIT攻读博士,主要研究视觉运动、深度强化学习代理、以及智能体的语言。
多篇论文被CVPR 17、NIPS 17、ICML 18等顶会收录。
传送门
Unsupervised Learning of Object Keypoints for Perception and Control
https://arxiv.org/abs/1906.11883
https://twitter.com/deepmindai/status/1145677732115898368?s=21
— 完 —
诚挚招聘
量子位正在招募编辑/记者,工作地点在北京中关村。期待有才气、有热情的同学加入我们!相关细节,请在量子位公众号(QbitAI)对话界面,回复“招聘”两个字。
量子位 QbitAI · 头条号签约作者
վ’ᴗ’ ի 追踪AI技术和产品新动态
- 微软公布19财年财报:净利润增长22%,云计算首超个人计算业务2019-07-19
- 腾讯云推出物联网边缘计算平台,具备五大特点,想攻克物联网落地难题2019-08-28
- DeepMind医疗业务几经动荡,现在团队并入Google2019-09-20
- 首例基因编辑干细胞治疗艾滋病:北大邓宏魁参与,达最佳治疗效果2019-09-14